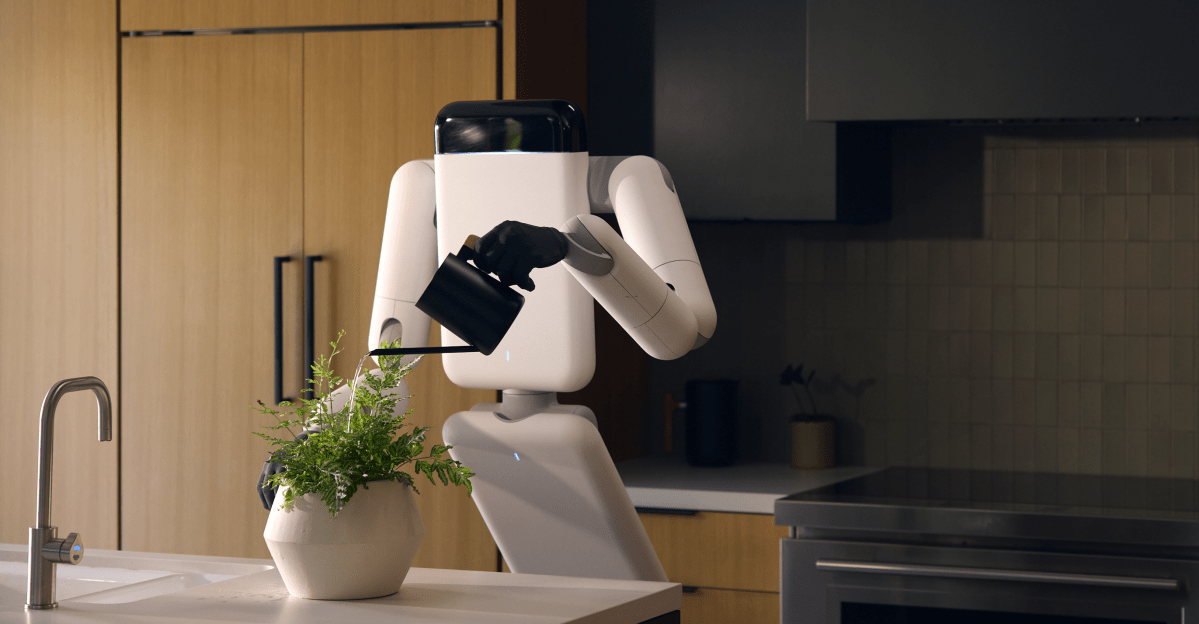
A new humanoid robot from French startup Genesis AI challenges the industry's obsession with human-like design. The robot, named Eno, has no head and no legs. It sits on a wheeled base and can fold down like a deck chair.
Genesis AI says the design philosophy is simple: humanoid robots do not need to look human. The company focuses on what it calls "human capability" rather than human appearance. This marks a notable departure from competitors building robots with heads, arms and legs that mimic people.
Design Philosophy Shift
Eno is intended as a general-purpose robot, not a machine built for one task like folding laundry or stacking boxes. Genesis AI says its hands are the only part that matches human form exactly. The company claims these hands replicate the shape and function of human hands precisely.
The startup is backed by former Google CEO Eric Schmidt, adding credibility to its approach. By rejecting anthropomorphic design, Genesis AI may solve practical problems that plague other humanoid robots: balance, power consumption and cost.
Why This Matters
The robotics industry has long assumed that humans will accept machines that look like them. But functional robots could enter homes and workplaces faster if they are cheaper, safer and more reliable than their human-like counterparts. A wheeled base eliminates fall risks. A foldable body reduces storage space. These features matter for real-world adoption in factories, warehouses and eventually homes.
Consumers may find non-human designs less intimidating than uncanny valley robots with faces and limbs. Businesses care about utility over aesthetics when deploying automation at scale.
Market Implications
Genesis AI enters a crowded field dominated by companies like Tesla with Optimus, Boston Dynamics with Atlas and Figure AI with Figure 02. Most of these competitors build bipedal machines that walk upright like humans. Eno's wheeled platform could offer advantages in stability and energy efficiency while still performing manipulation tasks through its advanced hands.
The trade-off involves mobility limitations on stairs or uneven terrain where legs excel. But for indoor environments such as factories or retail spaces, wheels often work better than legs anyway.
Technical Approach
The decision to prioritize hand dexterity over full-body anthropomorphism reflects an understanding that manipulation matters more than locomotion for many tasks humans want robots to perform: opening doors, picking up objects or using tools designed for people.
By matching hand form exactly while ignoring body form entirely elsewhere, Genesis AI creates a hybrid solution that borrows selectively from biology without copying it wholesale.