A new DIY bipedal robot is challenging the dominance of electric motors by walking on compressed air. The robot uses pneumatic artificial muscles, sometimes called McKibben muscles, to achieve walking motions that are lighter, safer and more compliant than traditional motor-driven systems.
How Pneumatic Muscles Work
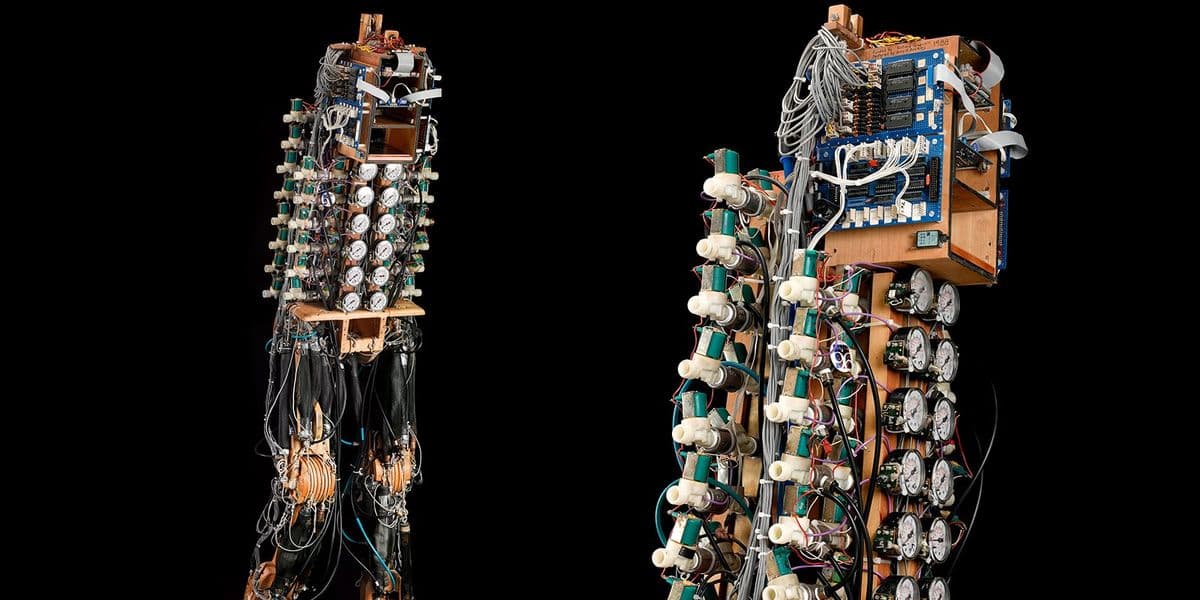
Pneumatic artificial muscles consist of a flexible inner tube surrounded by a braided mesh sleeve. When pressurized air enters the tube, it expands and shortens, contracting like a biological muscle. This provides a natural force and motion profile that mimics animal movement. The DIY robot uses several of these muscles arranged in pairs to control its legs, allowing it to walk stably without the rigid joints typical of motor-driven robots.
Unlike electric motors, which can be heavy and require complex gearing, the air muscles are lightweight and produce force through simple inflation. They also offer inherent compliance, meaning they can absorb impacts and adapt to uneven terrain without complex sensors or control algorithms.
Why This Matters
The development is significant for the field of soft robotics, which prioritizes flexible, safe and adaptable machines. Pneumatic actuators are already used in some industrial robots and rehabilitation devices, but this project shows they are viable for legged locomotion in a lightweight, DIY-friendly form. Hobbyists and researchers alike can build and experiment with such systems more cheaply than with custom motor units.
For consumer technology, this points to a future where robots might be built from simpler, safer materials, reducing both cost and injury risk during human-robot interaction. The robot also highlights the potential for off-the-grid or remote applications where compressed air is more available than electric power.
The builder published detailed build logs and code online, allowing others to replicate and improve the design. This open approach accelerates innovation in an area that has long been dominated by specialized labs.


